齊(qí)心協力(lì) 達識共建
致力於光伏領(lǐng)域,以“光伏(fú)支架研(yán)發、製造與銷售”、
“光伏電站EPC”、“光伏電站投資、運營”三大板塊為核心(xīn)
致力於光伏領(lǐng)域,以“光伏(fú)支架研(yán)發、製造與銷售”、
“光伏電站EPC”、“光伏電站投資、運營”三大板塊為核心(xīn)
全國(guó)谘詢熱線
全國(guó)谘詢熱線

電導增量法也是常用的一種MPPT控製方法,是對擾動觀察法的改進。其控製思想與擾動(dòng)觀察法類似(sì),也(yě)是利用dP/dV的方向進行最大功率點跟蹤控製,隻是太陽能電池工作在最大功率(lǜ)點時控製有所不同。由最大功率點處的太陽能電(diàn)池特性dP/dV,可(kě)推導公式(shì):

即

則(zé)可以由來

實現最大功率點的跟蹤。
當 ,增加陣列的參考工作電壓Vref;

當 ,減小陣列的參考工作電壓Vref;

當 ,陣列的參考工作電壓Vref不變。

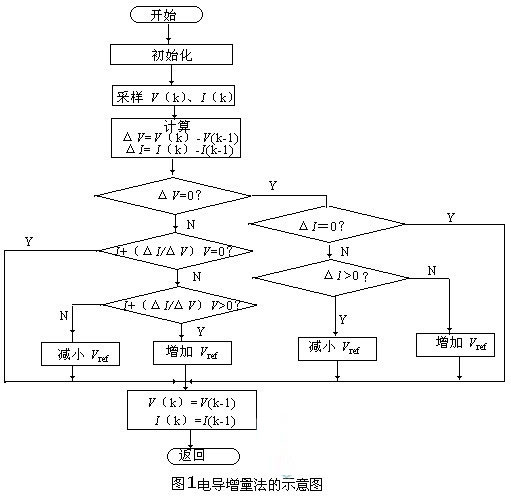
上式即為要達到最大功率點的條件,即當輸出電導的變化率等於輸出電導的負值時,陣列工作於(yú)最大功率點。這(zhè)種跟蹤(zōng)方法(fǎ)的優點是當環境條件發生變化時,能夠快速(sù)跟蹤其變化,並且太(tài)陽能電池陣列電壓擺動較擾動觀察法小;缺點是算法較複雜,並且在用數字方法實現時,對(duì)最大功率點的(de)判斷容易出現誤差。其常用的算法程序流程圖如圖1所示。
電導(dǎo)增量法的原理是在最大功率點處,有d p/dV=0,即滿足dI/dI=-I/V。理論上它(tā)比擾動觀(guān)察法好,能適應日照強度快速(sù)變化,但由於傳感器的精(jīng)度等因素,電導增量法往往難(nán)以實現。電導增量法實質是在CVT的基礎上,實時的改變太陽能電池的(de)工作點電壓,使得工作點電壓始終等於最大功率點處的電壓,從而實現最大功率點跟(gēn)蹤。它的內環就是CVT。電導增量法控製框圖如(rú)圖2所示。

現在對MPPT方式的研究集中在(zài)簡單(dān)、高(gāo)穩定性的控製算法實現(xiàn)上,如最優(yōu)梯度法、模(mó)糊邏輯(jí)控製法等、神經元網(wǎng)絡控製法一等,也都(dōu)取得了較顯著的跟蹤控製(zhì)效果(guǒ)。光伏發電係統用(yòng)的最大功(gōng)率點跟蹤(zōng)方法(fǎ)的工作步(bù)驟是(shì):
步(bù)驟1:用微處理(lǐ)器作為(wéi)該最大(dà)功率(lǜ)點跟(gēn)蹤(zōng)控製器,檢測太陽能電池太陽能電池(chí)陣列的輸出電壓Vn,電流In。

步驟2:微處理器判斷當前輸出(chū)電(diàn)壓Vn和上一(yī)控製(zhì)周期的輸出電壓采樣值Vb之差ΔV:若:ΔV=0,則:判斷當前輸出電流In和(hé)上一控製周期(qī)的輸出電流采(cǎi)樣值Ib之差dI;若:ΔV≠0,則:判斷ΔI/ΔV是否等於-I/V。
步驟(zhòu)3:根據步(bù)驟2的(de)判斷結果:若:ΔI=0,則:Vb=Vn,Ib=In;若:ΔI/ΔV=-I/V,則:Vb=Vn,Ib=In。

步驟4:根據步驟3的判斷結果:若:ΔI≠0,則:判斷ΔI>0否;若:ΔI/ΔV≠-I/V,則:判斷ΔI/ΔV>-I/V否。
步驟5:根據步驟4的判(pàn)斷結果:若:ΔI>0,則:微處理器控製方波發生電路(lù)和與該電路串接的脈寬調製脈衝形成電路,產生脈寬調製脈衝去減小連接在太陽能(néng)電池太陽能電池陣列輸(shū)出端的BUCK電路的占空比(bǐ),並使Vb=Vn,Ib=In。
若:ΔI/ΔV>-I/V,則:微處理器按所述步驟5的方(fāng)法減小占空比,並(bìng)使Vb=Vn,Ib=In。
若:ΔI<0,則:微處理器按所述步驟5的方(fāng)法增大(dà)占空比(bǐ),並使(shǐ)Vb=Vn,Ib=In;若:ΔI/ΔV<-I/V,則:微處理器(qì)按所述步驟5的方法增大占空比,並使Vb=Vn,Ib=In。


Copyright◎2021-2025 江(jiāng)蘇齊達新(xīn)材料有限公司(sī) All Rights Reserved. 蘇ICP備18012355號-2